

Nowadays, under-actuated surface vessels (USVs) are universally used, including reconnaissance operations, patrol missions, surveillance, search and rescue.
With the characteristics of multi-variable, nonlinear and under-actuation, control problems of USVs represent challenging tasks, and the full-state stabilization of the USVs is theoretically the most difficult one because no continuous time-invariant feedback control law makes the null solution of the USV error dynamics asymptotically stable.
Most of the existing design methods are based on the continuous-model of the USV. Since digital devices are used to control the USVs, the new control value is computed periodically at each sampling time, even after the system has achieved the control goal with sufficient accuracy, which may results in unnecessary high workloads and utilization of resources. Moreover, the mechanism of periodic implementations requires renewing the actuator state at every sampling instant, leading to unnecessary energy consumptions and even actuator attritions, due to frequent changes of the actuator state.
Recently, researchers from the Institute of Acoustics of the Chinese Academy of Sciences (IACAS) proposed a global event-triggered stabilization design method for USV. It significantly reduced the times for communication and the actuator burden while providing stable and accurate control performance.
Based on an inner-outer loop structure with Lyapunov control design technique, researchers separated the USV dynamics into two subsystems to facilitate the design and stability analysis. They constructed a time-varying variable to design the desired velocities used as virtual control inputs to stabilize the under-actuated outer loop subsystem. For the fully-actuated inner loop subsystem, they designed the actual control force and moment inputs using a switching threshold event-triggering mechanism to drive the actual velocities to the desired ones, thereby stabilizing the inner loop subsystem and the closed-loop system. The proposed event-triggered controller guaranteed global asymptotical convergence of the stabilization error by choosing proper control parameters.
Numerical simulation results indicates that the proposed control scheme processes higher control accuracy, lower energy consumption and fewer communication times than the traditional control methods.
The research, published online in Ocean Engineering, was supported by the National Natural Science Foundation of China.
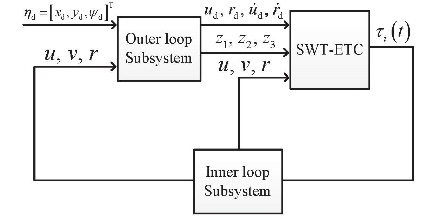
Figure 1. The inner–outer loop structure (Image by IACAS)
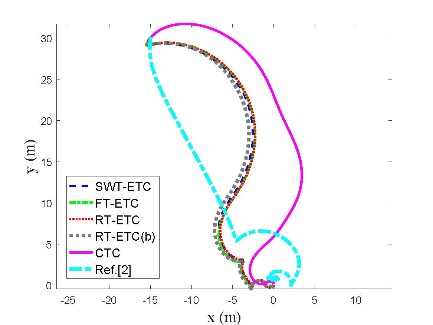
Figure 2. Global stabilization with the control schemes (Image by IACAS)
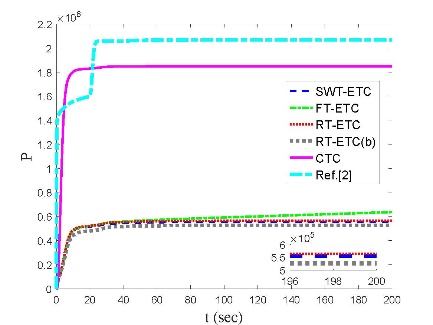
Figure 3. Energy consumption (Image by IACAS)
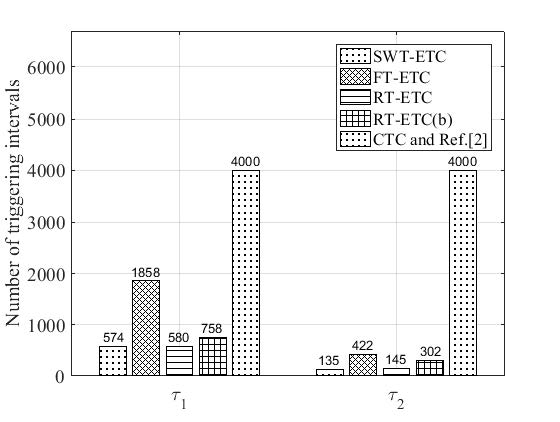
Figure 4. Number of triggering intervals (Image by IACAS)
Reference:
WANG Rui, SI Changlong, MA Hui, HAO Chengpeng. Global Event-triggered Inner-outer Loop Stabilization of Under-actuated Surface Vessels, Ocean Engineering (2020). DOI: 10.1016/j.oceaneng.2020.108228.
Contact:
ZHOU Wenjia
Institute of Acoustics, Chinese Academy of Sciences, 100190 Beijing, China
E-mail: media@mail.ioa.ac.cn